Atterrisseur et instruments
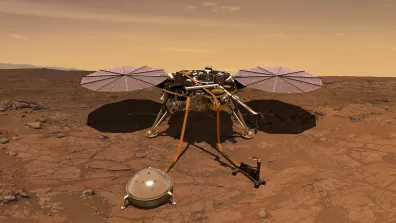
L’atterrisseur d’InSight
La mission InSight a une conception similaire à celle de l'atterrisseur martien de la mission Phoenix qui a été utilisé avec succès en 2007 pour étudier le sol glacé près du pôle nord de Mars. La réutilisation de cette technologie, développée et fabriquée par Lockheed-Martin Space Systems à Denver, Colorado, fournit une voie à faible risque sans coût additionnel de conception et de test d'un système repartant de zéro.
L'atterrisseur InSight emporte trois instruments à la surface de Mars pour regarder en détail pour la première fois les "statistiques vitales" de la planète :
- son pouls, activité interne, mesurée par l'instrument SEIS,
- sa température mesurée par l'instrument HP³,
- ses réflexes mesurés par l'instrument RISE.
Ensemble, ces données permettent de fournir des indices essentiels sur l'évolution non seulement de la planète Mars, mais aussi de toutes les planètes telluriques.
Les instruments
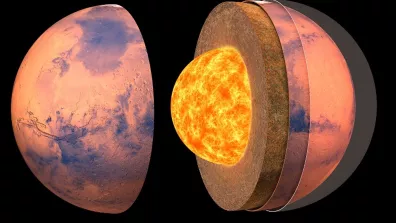
- SEIS : pour prendre le pouls de Mars, son activité interne, InSight a déployé à la surface un sismomètre nommé SEIS à la surface de la planète rouge. SEIS a fait des mesures précises des tremblements et autres activités internes de Mars pour mieux comprendre l'histoire et la structure de la planète.
- HP³ : pour mesurer le flux de température sous la surface de Mars (jusqu’à 5m), un indicateur clé de l'évolution planétaire, InSight a déployé une sonde de chaleur à la surface de Mars. L'instrument, nommé HP³, s’enfonce à cinq mètres de profondeur sous la surface de Mars, plus profondément que tous les bras, pelles, foreuses et sondeurs précédents, pour connaître la quantité de chaleur venant de l'intérieur de Mars et pour révéler l'histoire thermique de la planète.
- RISE : pour mesurer les oscillations de l’axe de rotation de Mars, ou la façon dont elle oscille quand elle est attirée par le Soleil, une expérience nommée RISE mesure avec précision le décalage Doppler et le parcours des communications radio entre l'atterrisseur InSight et la Terre. En étudiant les oscillations, les scientifiques peuvent déterminer la distribution des structures internes de la planète rouge et mieux comprendre comment elle est constituée.


Un quatrième instrument est dédié aux mesures météorologiques de vents et de températures de l’air, le Temperature and Winds for InSight (TWINS), intégré à la station météorologique APSS (Auxiliary Payload Sensor Suite) comprenant également des sondes de pression et température, ainsi qu’un magnétomètre.

En plus de ces 4 instruments, lnSight emporte également 4 systèmes :
- Laser RetroReflector for InSight (LaRRI) : un ensemble de catadioptres (coins de cubes) destinés au repérage laser de l’atterrisseur depuis l’orbite une fois mis à la retraite.
- Instrument Deployment Arm (IDA) : le bras robotique qui a déployé l’instrument SEIS sur le sol martien.
- Deux caméras, l’Instrument Deployment Camera (IDC) et l’Instrument Context Camera (ICC) : Insight inclut une caméra, similaire aux caméras "Navcam" à bord des Mars Exploration Rovers (MER) et des rovers Curiosity et Perseverance, montée sur le bras de l'atterrisseur et qui sert à prendre des images en noir et blanc des instruments sur le corps de l'atterrisseur ainsi qu'une vue en 3D du sol où le sismomètre et la sonde de chaleur sont placés. Elle a ensuite été utilisée pour aider les ingénieurs et les scientifiques à guider le déploiement des instruments au sol. Avec un champ de vue de 45 degrés, la caméra fournit aussi une vue panoramique du terrain autour du site d'atterrissage. Une seconde caméra similaire, avec une lentille à champ de vue de 120 degrés comme les caméras "Hazcam" sur les MER et Curiosity, est montée sous le rebord du corps de l'atterrisseur et fournit une vue complémentaire de la zone de déploiement des instruments.

L’instrument SEIS
Caractéristiques techniques
Le sismomètre SEIS est basé sur un instrument hybride de six axes qui est composé de:
- une sphère comportant trois capteurs sismiques très large bande (Very Broad Band - VBB) et leurs capteurs de température,
- trois capteurs sismiques courtes périodes (Short Period - SP) et leurs capteurs de température,
- une boîte électronique d'acquisition (e-box : SEIS AC, SEIS DC/DC, ASICS) et les cartes de contre-réaction des capteurs VBB, SP et du système de déploiement MDE,
- un système de déploiement (DPL),
- un logiciel (S/W).
Sa masse est d'environ 3 kg. Sa consommation varie autour de 1W selon les modes.
Les principales performances du sismomètre SEIS sont :
- VBB -9 m.s-² Hz-½ de 10-³ jusqu'à 10 Hz
- SP < 5 10-8 m.s-² Hz-½ de 10-² jusqu'à 100 Hzx

La sphère
La sphère abrite les capteurs très large bande VBB (Very Broad Band, VBB, en anglais). C'est le cœur de l'instrument. Elle comporte des servitudes pour permettre le meilleur fonctionnement possible des capteurs VBB.
- Elle intègre un écran thermique et des plots torlon pour réduire au maximum les variations de températures des sismomètres
- Elle maintient les capteurs sous vide
- Elle contient des capteurs de températures et des inclinomètres permettant l'exploitation des données mesurées par les senseurs sismiques VBB et SP.
Les capteurs large-bande (VBB) sont des pendules obliques.

Principe de fonctionnement
Le ressort et le poids du pendule s'équilibrent parfaitement. Lorsque le sol bouge, le pendule se met en mouvement. Ce mouvement est capté par le capteur DCS. Le mécanisme d'équilibrage permet d'ajuster l'équilibre du pendule aux conditions d'utilisation réelles (gravité mal connue, défaut de nivellement, influence de la température sur l'équilibre du pendule). Le pivot doit permettre la rotation de la partie mobile autour de son axe sans exercer le moindre frottement.
Le capteur de déplacement est constitué d'électrodes placées sur la partie fixe et sur la partie mobile. Les caractéristiques électriques de l'ensemble ainsi constitué (la capacité) forment une image de la position de la partie mobile du capteur.
L'électronique de proximité permet de transformer ces caractéristiques en une tension facilement mesurable. C'est cette tension qui est transmise à l'électronique d'acquisition. La bobine de contre-réaction permet l'asservissement du pendule pour en améliorer les performances (augmentation de la bande-passante). L'intensité qui parcourt la bobine est délivré par la carte de contre-réaction "SEIS-FB" située dans l'e-box. Cette intensité est générée en fonction de la mesure de déplacement du pendule.


Les capteurs courte-période (ou SP : Short Period)
Les trois capteurs courte-période enregistrent l'accélération du sol le long de leurs axes de sensibilité. Le mouvement d'une masse mobile est détecté par un capteur à détection synchrone. Pour étendre la bande passante, la masse mobile est verrouillée sur zéro grâce à la boucle de contre-réaction, qui agit sur un actionneur magnétique de type bobine-aimant. La boucle de contre-réaction contrôle le courant injecté dans la bobine, elle-même plongée dans un champ constant.

Le système de déploiement
La structure de déploiement est composée d'un cadre portant trois pieds déployables et la sphère. Le support de la sphère doit assurer une inclinaison de ±18° à l'intérieur du lander. Deux approches sont envisagées pour le système de déploiement : un système cardanic (composé d'un anneau de cardan et de deux moteurs) et un système à trois axes (vis-écrous). Enfin, un système permet de faire descendre le sismomètre au sol.
Le logiciel de vol
C'est l'un des logiciels qui est exécuté sur l'ordinateur de bord du lander (CDMS). Il interagit avec le sismomètre et le lander afin de stocker les données dans la mémoire de masse et les communiquer à la terre.
Ses fonctions principales sont les suivantes :
- assurer le bon état de fonctionnement de l'instrument
- enregistrer les données sismiques
- réaliser les traitements (compression)
- gérer les Télécommandes (TC) reçues
- renvoyer les données pertinentes par Télémesures (TM).
Le logiciel reçoit et interprète les commandes envoyées depuis le sol (TC). C'est lui qui déclenche le déploiement de l'instrument et permet toute la séquence d'installation (nivellement de la sphère, recentrage des sismomètres VBB) du sismomètre à la surface de Mars.
Une fois SEIS installé et prêt pour l'expérience de sismologie, le logiciel passe en mode opérationnel. Il a alors pour rôle la gestion de l'instrument et la récupération des données.
La gestion de l'instrument consiste à passer d'un mode à un autre pour ajuster le fonctionnement du sismomètre aux ressources disponibles (ex : mode "winter" lorsque la puissance électrique disponible est faible, ou mode "campaign" pour maximiser le retour scientifique lorsque cela est possible).
Pour récupérer les données, le logiciel effectue plusieurs tâches :
- l'enregistrement et la compression des mesures pour minimiser l'espace mémoire occupé
- le renvoi (en télémesure) des mesures brutes (sans perte d'information) correspondant à des périodes choisies par les scientifiques
La complexité du logiciel de vol provient de l'automatisation de toutes les opérations sur le sismomètre, de la faible puissance électrique disponible et enfin du volume de données à stocker. En effet, la sismologie nécessite d'enregistrer des mesures en continu, du fait de l'impossibilité de prévoir à l'avance les séismes. Le volume de données ainsi enregistrées est donc bien supérieur aux capacités de transmissions entre Mars et la Terre.