Direction Phobos fin 2026 pour la mission MMX ! Cette mission, initiée par l’agence spatiale japonaise (JAXA), a pour objectif d’explorer les lunes de Mars (lire encadré en fin d'article). L’un des modules emportés à bord est le petit rover Idefix®, co-développé par le CNES et l’agence spatiale allemande, le DLR. Celui-ci tentera de se poser et d’évoluer sur Phobos, dont on ne connaît pas la nature du sol. Alors que le décollage approche, Ies équipes françaises et allemandes sont en pleins essais sur le rover.
Fin novembre, quatre ingénieurs du CNES se sont ainsi rendus en Allemagne, près de Munich, pour effectuer des tests sur un prototype d’Idefix®. Les essais se sont déroulés au Planetary Exploration Laboratory (laboratoire d’exploration planétaire, PEL) du DLR, sur une reconstitution de terrain phobosien. En base arrière, l’équipe logiciel de vol et commande/contrôle apportaient un support à distance depuis Toulouse. Clément Brysbaert, responsable système Idefix®, nous emmène dans les coulisses de cette mission.
Jour 1 : la préparation de Prototypix
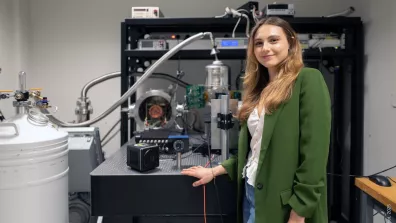
Nous arrivons au centre du DLR, l’agence spatiale allemande, situé à Oberpfaffenhofen, près de Munich. Là, le DLR a reconstitué un terrain qui peut s’apparenter à celui de Phobos, la lune de Mars où atterrira Idefix®. Évidemment, la gravité change : sur Phobos, elle est environ 1 800 fois moindre que sur Terre ! Nous sommes là pour quatre jours pour travailler « en conditions représentatives » sur un prototype du rover baptisé… Prototypix.
Sur le rover, le DLR développe le châssis, le système de locomotion et deux instruments. Le CNES fournit les quatre caméras, le senseur et les panneaux solaires, ainsi que le cœur du rover. Nous avons donc emporté avec nous des caméras représentatives du vol. Il s’agit de deux « NavCams » (caméras de navigation) situées à l’avant, qui sont comme les yeux du rover et nous permettront d’acquérir des images en stéréoscopie.
Après une réunion de préparation de Prototypix, nous nous rendons sur le terrain pour préparer nos essais.
Ce qui nous intéresse ici, c’est la navigation autonome du rover : Idefix® embarquera un logiciel qui nous permettra de lui envoyer des commandes à distance ; il choisira ensuite de son propre chef le chemin le plus approprié. Par exemple, s’il détecte un gros caillou sur la trajectoire, il le contournera. Pour cela, nous prenons des images avec les deux NavCams qui restituent la stéréoscopie du terrain. Ces images seront ensuite utilisées par le logiciel de navigation autonome. C’est ce que nous sommes venus tester au DLR, sur ce fameux terrain du PEL.
Jour 2 : un problème à résoudre
Nous faisons nos premiers essais. Via le système de navigation autonome, nous prenons des images avec les NavCams, envoyons des ordres à la « loco » (le système de locomotion du rover), reprenons des images… Mais nous nous rendons rapidement compte qu’il y a un problème sur la restitution des images en stéréoscopie et parvenons à l’identifier : dans le logiciel de vol, les caméras gauche et droite sont inversées !

Jour 3 : échanges de bons procédés
Après cette correction, les tests reprennent. La navigation autonome permet de régler automatiquement l’exposition des prises d’images, de détecter les obstacles et les zones dangereuses (zones d’ombre) et de rouler de manière autonome.
Nous alternons nos tests avec ceux du DLR. Ces essais communs nous permettent aussi des échanges de bons procédés. Par exemple, le DLR se sert de notre scanner 3D qui permet de reconstituer le terrain en trois dimensions, et nous nous servons de leur « tracking system » qui permet de suivre l’avancée du rover sur le terrain phobosien. En fin de journée, nous partons découvrir les spécialités locales pour une soirée bien méritée !
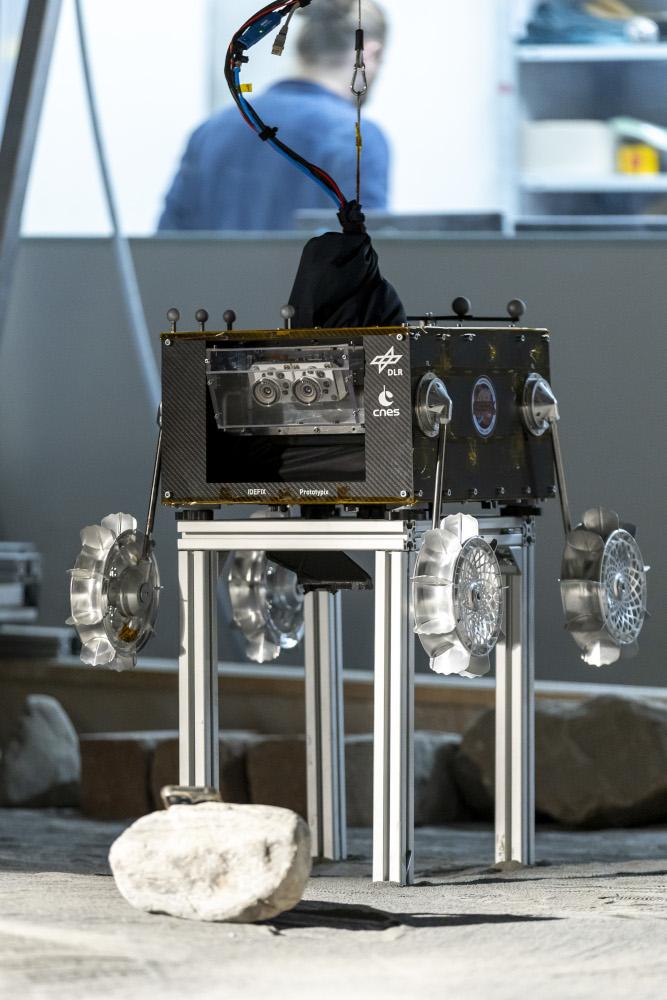
Jour 4 : la séquence héliotrope
C’est le troisième et dernier jour d’essais et il est temps pour notre équipe de tester la « séquence héliotrope ».

Sur l'image ci-dessus, Prototypix ne fait pas une salutation au Soleil ! Mais sur Phobos, son grand frère Idefix® s’inclinera dans la direction de notre astre afin de recharger ses batteries de manière optimale.
En faisant faire cette manœuvre à notre prototype, nous capturons des images en continu à l’aide des NavCams qui permettront de tester le logiciel de navigation autonome du rover. Ces résultats seront utiles par la suite aux équipes du CNES situées à Toulouse pour réaliser des tests sur simulateur. Ce simulateur, ainsi que le modèle d'essai appelé « flat rover », constituent des moyens de validation qui tournent à plein régime pour les tests en cours. Mais de cela, nous vous parlerons lors d’un prochain épisode !
C’est la fin de journée et il est temps pour nous de prendre le dernier vol de la journée pour rentrer à Toulouse. Nous vous donnons rendez-vous dans quelques mois pour la troisième et dernière campagne d’essais à Oberpfaffenhofen ! Le logiciel de navigation autonome sera alors finalisé et des tests généraux pourront être réalisés.
Percer les mystères des petites lunes de Mars
L’origine des deux petites lunes de Mars, Phobos et Deimos, recèle bien des mystères. Sont-elles issues, comme notre Lune, d’un impact colossal entre la planète rouge et un autre corps céleste lors des prémices du Système solaire ? Sont-elles des astéroïdes capturés en orbite par Mars ? C’est pour répondre à cette question, approfondir au maximum les connaissances sur Phobos et Deimos et comprendre leur passé, que l’agence japonaise JAXA a mis en œuvre la mission MMX. Le CNES s’investit sur la mission MMX à travers trois thématiques différentes :
- l’étude des trajectoires et de la dynamique du vol en amont de la mission et une possible participation aux opérations en vol,
- la participation au volet scientifique grâce au spectromètre imageur proche infrarouge MIRS qui sera installé sur la sonde,
- la réalisation du rover Idefix® qui tentera de rouler sur Phobos, en collaboration avec l’agence spatiale allemande (DLR).