The MMX mission initiated by the Japan Aerospace Exploration Agency (JAXA) will depart for Phobos at the end of 2026 to explore Mars’ moons (see box below). One of the modules it will be carrying is the diminutive Idefix® rover developed jointly by CNES and the German space agency DLR. Idefix® will attempt to land on and scout Phobos, whose surface we nothing about. With lift-off fast approaching, the French and German teams are putting the rover through its paces.
Late last November, four engineers from CNES were in Germany, near Munich, to run tests on a prototype of Idefix® at DLR’s Planetary Exploration Laboratory (PEL) yard simulating Phobos terrain. The flight and command/control software team provided remote support from Toulouse. Clément Brysbaert, Idefix® System Manager, takes us behind the scenes of this mission.
Day 1: Preparing Prototypix
We arrive at DLR’s field centre in Oberpfaffenhofen, near Munich, where it has a yard that simulates the terrain on Phobos, the Mars moon where Idefix® will set down. Obviously, the gravity isn’t the same, as on Phobos it’s about 1,800 times weaker than on Earth. We’re here for four days to work in representative conditions on a rover prototype we’ve dubbed Prototypix.
DLR is responsible for developing the rover’s chassis, locomotion system and two instruments. CNES is supplying four cameras, the solar tracker and solar panels, and the core of the rover. We’ve therefore brought with us two representative models of the NavCams at the front of the rover, which serve as its eyes and will allow it to acquire stereo imagery.
After a meeting to prep Prototypix, we go to the testing ground.
The focus for our trip is the rover’s ability to navigate autonomously: Idefix® will have software able to receive remote commands from us; it will then set its own course. For example, if it detects a large boulder in its path, it will skirt around it. To do this, we acquire two images with the two NavCams to picture the terrain in stereo. These images will then be used by the rover’s autonomous navigation software, which is what we’re here to test in DLR’s PEL yard.
Day 2: An issue to be resolved
We start testing. Via the autonomous navigation system, we take images with the NavCams, send commands to the rover’s locomotion system, take more images, etc. but we soon identify an issue with the stereo acquisition process: the left and right cameras are inverted in the flight software!

Day 3: Doing each other a favour
With this issue corrected, testing resumes. The autonomous navigation system automatically adjusts the image exposure, detects obstacles and danger areas (in shadow) and enables the rover to self-drive.
We alternate our tests with DLR. These joint tests also give us the chance to do each other a favour. For example, DLR uses our 3D scanner to view the terrain in three dimensions, while we use their tracking system to monitor the rover’s progress in the Phobos yard. At the end of the day, we go out for a well-deserved meal consisting of the local specialities!
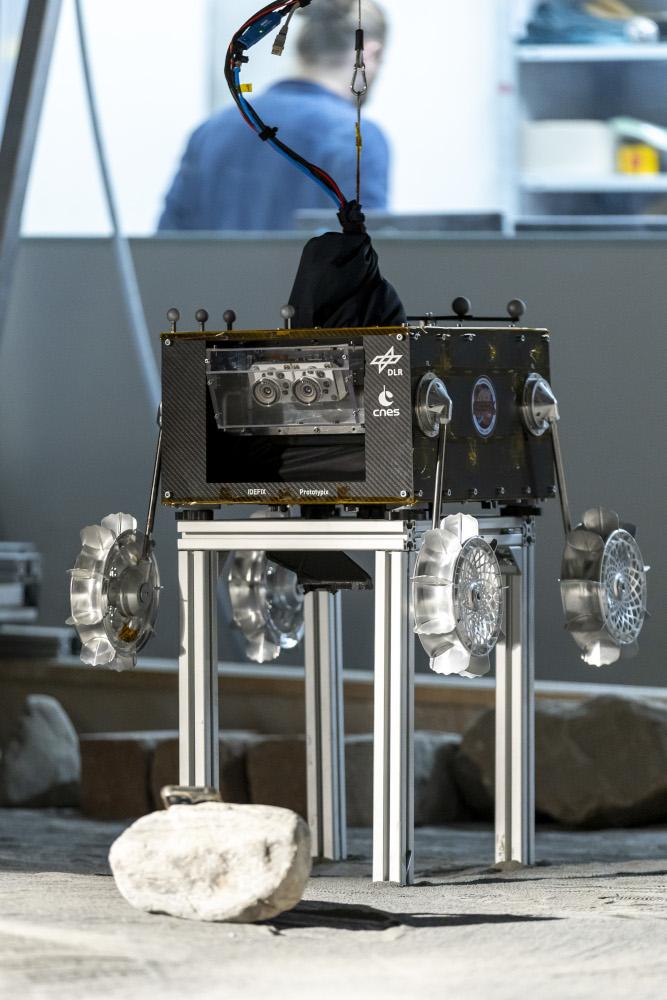
Day 4: The heliotropic sequence
It’s the third and last day of testing, and time for our team to test the “heliotropic sequence”.

Don’t be deceived by the picture above: Prototypix isn’t hailing the Sun! But on Phobos, big brother Idefix® will have to tilt towards it to fully recharge its batteries.
By getting our prototype to do this manoeuvre, we acquire images continuously through the NavCams to test out the rover’s autonomous navigation software. These results will help CNES’s teams in Toulouse to subsequently run tests on a simulator, which with the “flat rover” test model serves as the validation toolbox for this series of tests. But that will be for a future episode!
We’ve reached the end of the day, and it’s time to catch the last flight back home to Toulouse. Catch up with us in a few months’ time for the third and final test campaign in Oberpfaffenhofen, where we’ll be putting the finishing touches to the autonomous navigation software and running overall tests.
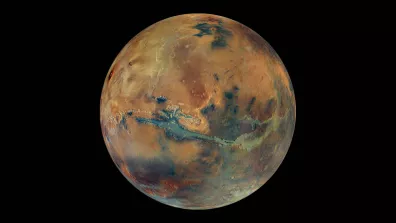
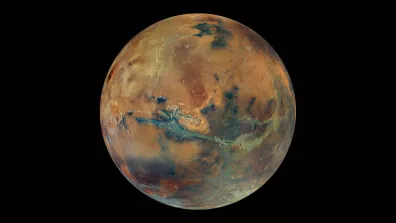
Piercing the secrets of Mars’ tiny moons
The origin of Mars’ tiny moons, Phobos and Deimos, is cloaked in mystery. Are they, like our own Moon, the remnants of a colossal impact between the red planet and another celestial body at the dawn of the solar system? Or are they asteroids captured into Mars’ orbit? JAXA’s MMX mission is designed to answer this question, to gain new insights into Phobos and Deimos, and to probe the secrets of their past. CNES is contributing to the mission in three areas:
- studying flight trajectories and dynamics for the cruise phase, and possibly flight operations
- mission science with the MIRS near-infrared imaging spectrometer on the robotic probe
- building the Idefix® rover with teams at the German space agency DLR, to attempt the unique feat of driving on Phobos