20 May 2008
Ocean return trip
Jason-2’s mission—or, to be precise, that of its Poseidon-3 altimeter—is to measure sea-surface height.
Poseidon-3 achieves this by bouncing a radar signal off the ocean surface. It then receives the reflected “echo” and calculates the distance—or range—from the satellite to the surface from the signal’s return trip time, since the 2 are proportional.
Poseidon-3 achieves this by bouncing a radar signal off the ocean surface. It then receives the reflected “echo” and calculates the distance—or range—from the satellite to the surface from the signal’s return trip time, since the 2 are proportional.
The range (R) is derived by multiplying the time taken by the signal to reach the surface and its velocity. The satellite’s altitude (S) is determined by the 3 positioning systems. The sea-surface height (S–R) is the difference between the satellite’s altitude relative to the reference ellipsoid and the altimeter range.
The shape of the reflected signal gives indications about wave height: if the ocean surface is flat, the reflected and emitted signals are similar; if it is rough, the larger the waves the more the echo and the emitted signal differ.
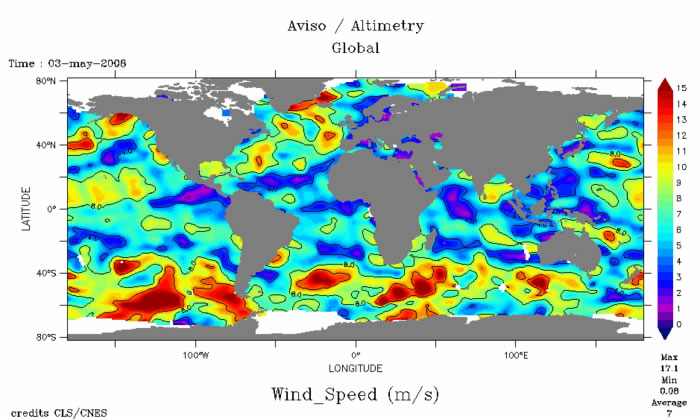
Satellite altimetry also reveals wind speed, current direction and seafloor topography. In other words, a single range measurement contains information about the entire water column and the ocean floor.
Complementing altimetry measurements
But, to calculate sea-surface height (or sea level), we need to know the satellite’s exact position. This is where the 3 positioning systems—DORIS, LRA and GPSP—come in. These systems complement each other to give the satellite’s position with centimetre accuracy.
However, altimeter measurements are distorted by water in the atmosphere. To correct for this error, the Advanced Microwave Radiometer (AMR) collects 3 signals at different wavelengths from the ocean.
However, altimeter measurements are distorted by water in the atmosphere. To correct for this error, the Advanced Microwave Radiometer (AMR) collects 3 signals at different wavelengths from the ocean.

The AMR is a passive sensor that collects certain signals from the ocean and deduces atmospheric parameters, for example, clouds and wind speed.
These 3 parameters are derived from the return trip time of each signal emitted from the satellite. They are then used to correct the altimeter measurements and fed into ocean forecast models.
More about
JASON, the ocean observatory
TOPEX/POSEIDON, the beginnings of satellite oceanography
How altimetry works
TOPEX/POSEIDON, the beginnings of satellite oceanography
How altimetry works
Related links
Previous news
Jason-2 takes to the air
7 May 2008
7 May 2008